


Robot Arm
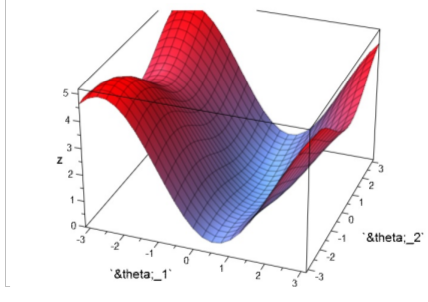
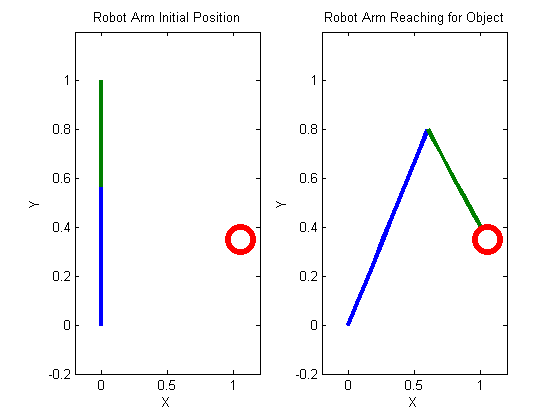
I made a robot arm algorithm that calculates the angles of each segment of the robot arm in order to reach an object. This formulation uses only two arm segments; however, it is straight forward to generalize the algorithm for robot arms with any number of segments. I formulated the problem using the distance formula in 2D. Then rewrote the x and y coordinates of the robot arms using trigonometry. Next I wanted to turn the problem into a fixed point problem but it was non-trivial to isolate the angles. Since isolating the angles was tough, I turned the equations into a root finding problem by using Newton's Method. Pop-Quiz: Notice that you should not use Newtons Method on dsqrd. Newton's Method should be used on the derivatives of dsqrd. Make sure you understand why before attempting this on your own. From left to right the images are the mathematical model, Newton's Method, and the robot arm reaching for an object.

Robot Navigation
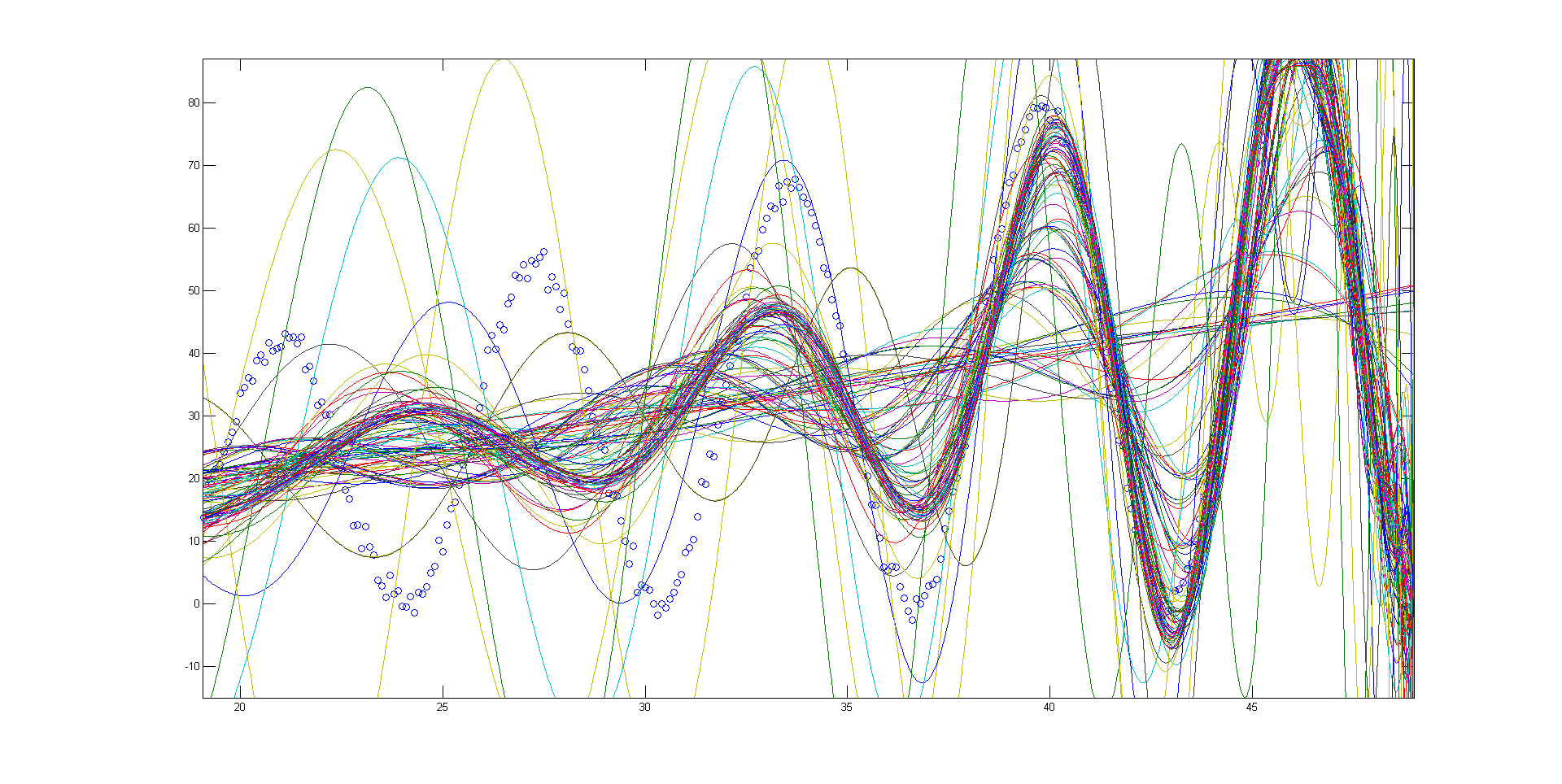
The following is a video of my 2D robot navigation algorithm. The algorithm uses the simplex method to find where it wants to go. Then travels there maneuvering around obstacles on the way with least squares. Essentially the algorithm used math to give sight and a tiny brain to my robot! The figure on the right is an example of high order least squares.
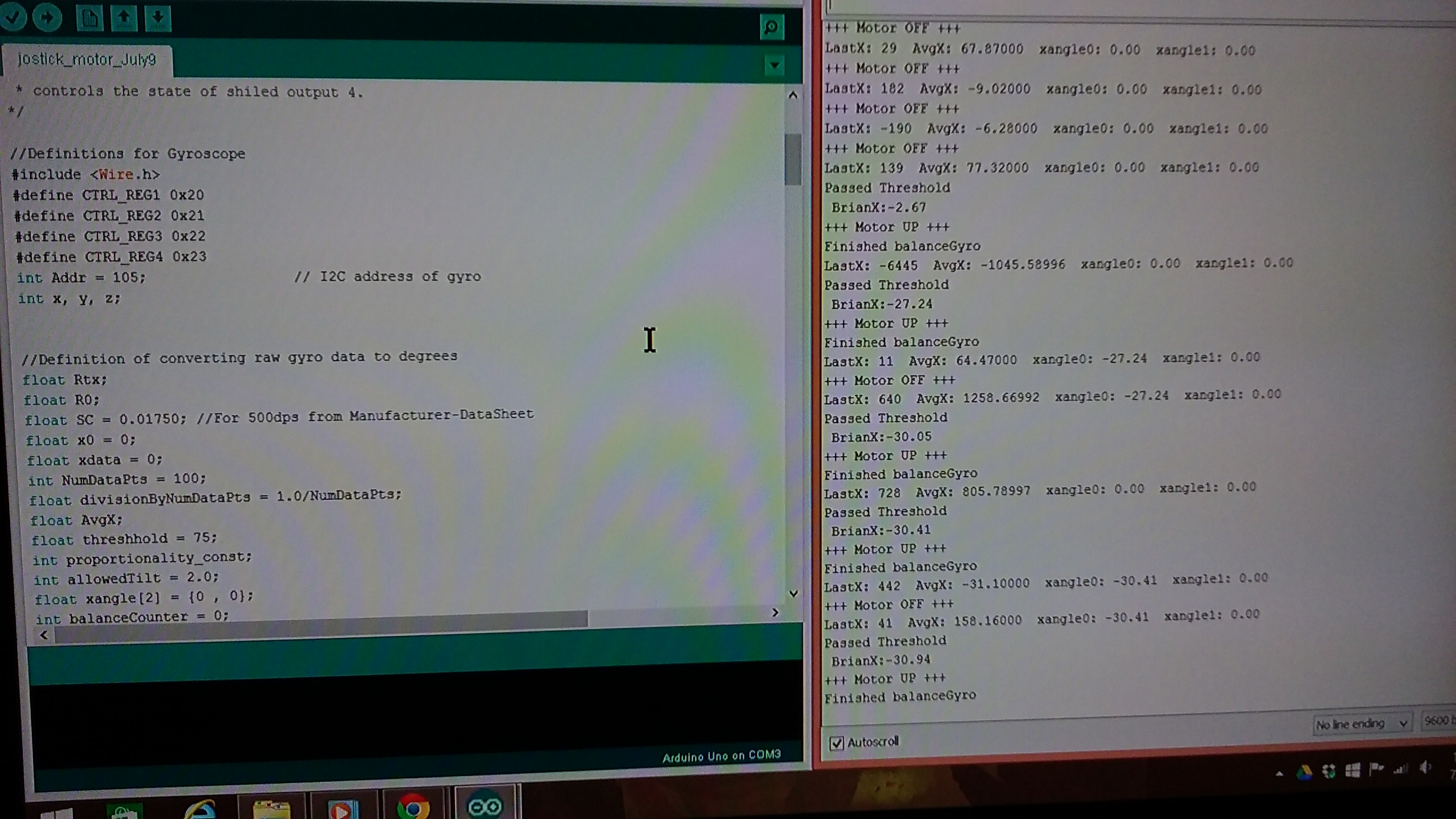
Arduino Guts of Unmanned Aircraft System
The image on the left is an Arduino sketch I wrote writing sensor data to the monitor. The sensor I'm using is called a gyroscope. A gyroscope measures rotations per second around the x, y, and z axes. Gyroscopes are vital for stabilizing machinery such as aircraft and robots. The image on the right is my Mach Zero of an Unmanned Aircraft System (UAS). It consists of an Arduino Uno, a Seeed Studio Motor Shield, a Parallax L3G4200D Gyroscope, and a single dc motor atop an egg carton for hands free testing. My UAS may be made from egg cartons now but the gyroscope code is complete. My next step will be creating a frame and mounting multiple motors. Check back on my blog for updates on my UAS.